
Forschungsprojekt
Robotik in der Landwirtschaft
Erforschung der Möglichkeiten der Vollautomatisierung in der Nahrungsmittelproduktion und allgemeine landwirtschaftliche Aufgaben wie die Erkennung, -Lokalisierung und Behandlung von Unkraut.
zurück zur Übersicht Projektliste
Ein moderner Landwirtschaftsbetrieb steht gleichzeitig vor mehreren Herausforderungen. In den industriell entwickelten Ländern bringt der Arbeitskräftemangel, der durch das Herbizidverbot erzwungene Übergang vom traditionellen zum ökologischen Landbau und der starke Preisdruck aus Billiglohnländern, den modernen Landwirt an existenzielle Grenzen. Die natürliche Produktion ermöglicht ein anderes Preissegment, obwohl sie für den Landwirt eine viel höhere Arbeitsbelastung bedeutet.
Das ILT erforscht die Möglichkeiten der Vollautomatisierung in der Nahrungsmittelproduktion und allgemeine landwirtschaftliche Aufgaben wie die Erkennung, -Lokalisierung und Behandlung von Unkraut. Unsere Institution arbeitet eng mit führenden Forschungsinstitutionen in der Schweiz und der EU zusammen. Das Studentenprojekt "WeedEraser" stellt das erste Ergebnis in Richtung eines autonomen und ökologisch überzeugenden Unkrautbekämpfungssystems dar.
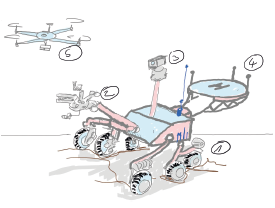
Das Trägersystem kann bis zu 250 kg Behandlungsgut transportieren, navigiert zentimetergenau mit dem GNSS-RTK-System und kann als Start- und Landeplattform für Aufklärungsdrohnen dienen.
Unkraut-Erkennung
Die Unkrauterkennung in Echtzeit stellt die höchste (grösste) Hürde für eine effiziente automatische Unkrautregulierung dar. Der wirtschaftlichste Ansatz zur Unkrautregulierung ist nach wie vor der Einsatz von Herbiziden, obwohl heutzutage die erforderliche Dosis und der Ort der Anwendung genau festgelegt werden muss. Eine vollautomatische und umweltfreundliche Unkrautbekämpfung erfordert völlig neue Methoden der Unkrauterkennung, insbesondere unter Berücksichtigung der Lokalisierung der Behandlungsstelle. Fortschritte im maschinellen Lernen haben Möglichkeiten geschaffen, neue Methoden innerhalb kürzester Entwicklungszeit zu entwickeln.
Am ILT modifizierten wir einen bestehenden, auf dem U-Netz basierenden Segmentierungsalgorithmus und eine neue Methode zur Erkennung von Unkrautwurzeln mit Deep Learning. Das Verfahren stützt sich auf Nahaufnahmen von Wiesenpflanzen und kann bis zu 95% der Pixel korrekt segmentieren und in 75% der Fälle die Unkrautwurzel korrekt lokalisieren, [https://doi.org/10.1109/ELMAR.2019.8918914].
Wir untersuchen derzeit Möglichkeiten zur Anpassung der Algorithmen für Daten welche mithilfe von Quadrocoptern aus grösseren Höhen aufgenommen werden. Ziel ist die Aufrechterhaltung der Erkennungsrate bei gleichzeitiger Erhöhung der Effizienz der Datenerfassung. Eine grössere Höhe über Grund erhöht die Flächengröße auf der Objektebene und verringert bei gleichem Kameraaufbau proportional den Detailgrad. Die Abnahme der Auflösung reduziert die Leistung des CNN dramatisch.
Behandlung
Die umweltfreundliche Unkrautregulierung wurde von Agroscope [https://doi.org/10.4081/jae.2014.239] in den letzten 15 Jahren intensiv erforscht. Sie hat verschiedene Methoden zur biologischen Unkrautbekämpfung hervorgebracht. Am erfolgreichsten ist die thermische Methode, genauer gesagt die Warmwasserbehandlung. Die Zusammenarbeit zwischen ILT und Agroscope führte zum WeedEraser-Fahrzeug, das mit einer Heisswasserbehandlungseinheit und Kontrollmechanismen zur korrekten Positionierung der Düsen über der Unkrautpflanze ausgestattet ist.




Projektfinanzierung:
Innosuisse
Kooperation:
Umsetzungspartnern fenaco AG, Huawei und Sunrise Communications AG, sowie Forschungspartner Agroscope, Digital Production
Projektverantwortlicher
Prof. Dr. Dejan Šeatović
ISF Institut für intelligente Systeme und Smart FarmingInstitutsleiter ISF - Institut für Intelligente Systeme und Smart Farming
+41 58 257 47 04dejan.seatovic@ost.ch
