Genauere Orientierungsdaten durch Kamerasystem
Ziel der Arbeit: Safran Vectronix AG fertigt sowohl handgehaltene als auch stationäre Mess- und Beobachtungsmittelmittel für den militärischen Einsatz. Diese können je nach Gerät die eigene Position ermitteln, Ziele bestimmen und Distanzen oder entlegene Positionen in Erfahrung bringen. Zum jetzigen Zeitpunkt werden viele dieser Methoden mittels Laser und Magnetfeldsensoren durchgeführt. Insbesondere die Magnetfeldsensoren sind jedoch sehr störanfällig. Vectronix will nun mithilfe einer inertialen Messeinheit (IMU), einer Kombination aus Beschleunigungssensoren und Drehratensensoren und einem digitalen Magnetkompass (DMC) ein neues Modul entwickeln, welches unabhängig vom Magnetfeld die Ausrichtung des Gerätes beibehalten kann. Für dieses neue Modul soll eine Demonstrator-Applikation geschrieben werden, welche die Funktion aufzeigen kann und zusätzlich mit Hilfe einer Kamera Verbesserungen erzielen soll. Anschliessend soll mit diversen Tests eine provisorische Qualifizierung durchgeführt werden.
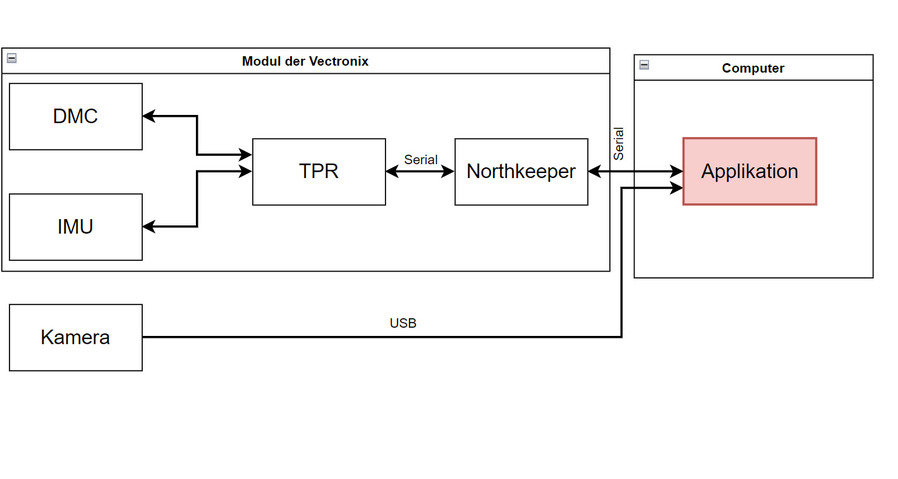
Vorgehen: Um die IMU überhaupt verwenden zu können, muss diese erst initialisiert und die zur Nordrichtung relative Ausrichtung von der Applikation über die serielle Schnittstelle an den Northkeeper gesendet werden. Aufgrund dessen wird als Erstes eine Nordfindung durchgeführt. Die Applikation kann drei verschiedene Methoden zur Nordfindung einsetzen. Einmal kann auf den im Modul vorhandenen Kompass zugegriffen werden, um mit dem Magnetfeld der Erde Norden in Erfahrung zu bringen. Als zweite Methode kann der Benutzer einen bekannten Orientierungspunkt anzielen, damit mit der eigenen Position und den Koordinaten des Landmarks die Ausrichtung zu Norden berechnet werden kann. Des Weiteren kann auch mit der Sonne die Nordfindung ausgeführt werden. Dafür wird die aktuelle Zeit und ebenfalls die eigene Position benötigt. Die aus der Nordfindung abgeleiteten Daten werden an die IMU gesendet, welche daraufhin beginnt, die Ausrichtung des Gerätes beizubehalten. In der Applikation kann nun eine Markierung auf ein Objekt gesetzt werden. Diese Markierung wird dann dank der Daten, die fortlaufend vom Modul an die Applikation gesendet werden, auf dem Objekt gehalten, auch wenn der Demonstrator bewegt wird. Die Kamera wird ebenfalls dazu genutzt markante Stellen zu speichern und später wieder zu erkennen. Dies soll mögliche Abweichungen minimieren.
Ergebnis: Mit verschiedenen Tests wurden sowohl die Nordfindung als auch die Funktion des Moduls überprüft. Es fällt auf, dass besonders das gewählte Kameramodul eine Schwäche darstellt. Aufgrund des grossen Öffnungswinkels der Kamera fällt eine präzise Ausrichtung schwer. Dafür wird eine Bildverarbeitung in einem erhöhten Sichtbereich ermöglicht. Bei Produkten von Safran Vectronix werden Optiken verwendet, welche einen viel kleineren Öffnungswinkel haben. Dies führt zu einer wesentlich besseren Genauigkeit. Der Nutzen der Bildverarbeitung ist aktuell gering. Da es sich noch um eine Vorstufe für das finale Produkt handelt, können zwar die Funktionen gezeigt und Schlüsse gezogen werden, jedoch muss die Methodik für das Endprodukt verbessert werden.