Ferngesteuerter Modell-Segway
Ausgangslage: Als anschauliches Projekt für die Modellierung eines dynamischen Systems im Zustandsraum und dessen Zustandsregelung soll im regelungstechnischen Unterricht (Modul EuR_IV) ein Modell-Segway mittels eines Mikrokontrollers stabilisiert werden. Ferngesteuert über eine App soll der Segway umherfahren können. Zukünftige Studenten sollen das erlernte Fachwissen mit Hilfe des Modell-Segway in der Praxis anwenden.
Die Hardware mit den notwendigen Sensoren und Aktoren sowie einem Mikrocontroller soll aus möglichst gut verfügbaren und preisgünstigen Komponenten zusammengestellt werden, welche leicht zusammengebaut werden können, so dass robuste Geräte mit sehr ähnlichem dynamischen Verhalten entstehen. Der komplette Modell-Segway soll nicht mehr als 150 CHF kosten. Ziel ist es, einen Prototyp mit Teileliste zu konstruieren, den die Studierenden in einer Projektarbeit dann im Unterricht selbst zusammenbauen, ein lineares dynamisches Modell erstellen und eine Regelung dazu entwerfen.
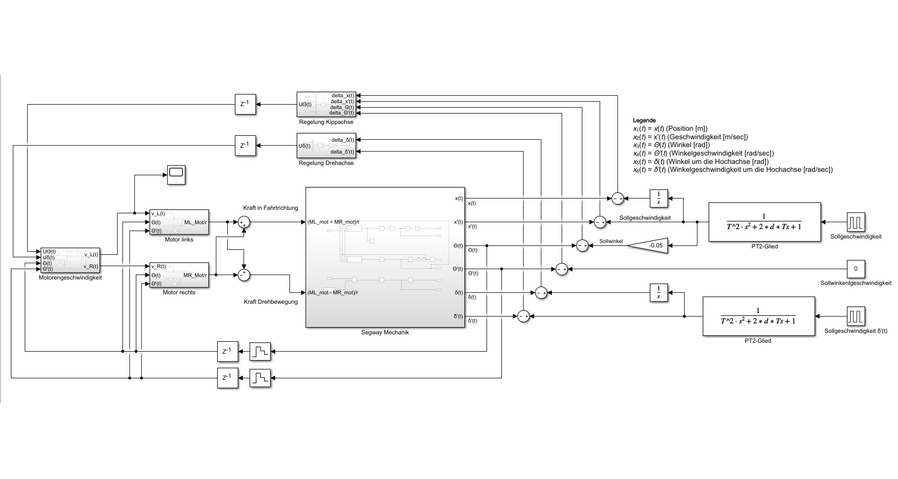
Vorgehen: Im Rahmen dieser Bachelorarbeit wurde der Modell-Segway mithilfe von Differentialgleichungen modelliert. Anhand des so ermittelten Zustandsraummodells konnten die Anforderungen an die zu verwendende Sensorik sowie den Mikrokontroller abgeschätzt werden. Komponenten für einen ersten Prototyp, wurden mithilfe dieser Anforderungen evaluiert.
Die Umsetzung des Prototyps umfasste drei Teilbereiche: Die mechanische Konstruktion, das Design eines Prints mit geeigneten elektronischen Schaltungen inklusive Mikrocontroller und Sensorik sowie die Entwicklung einer Software mit dazugehöriger Smartphone App zur Regelung und Steuerung des Modell-Segway.
In einem iterativen Vorgehen wurde der Prototyp fortlaufend mechanisch sowie softwaretechnisch angepasst und verbessert. Es wurden mehrere Varianten mit verschiedenen Mikrocontrollern, Motoren sowie Sensoren getestet und evaluiert, um eine möglichst einfache, kostengünstige und doch zuverlässige Lösung zu finden.
Ergebnis: Um der Anforderung an geringe Kosten und Komplexität gerecht zu werden, wurde hauptsächlich auf Standardkomponenten und 3D-Druck-Technik zurückgegriffen. Das Herzstück des Modell-Segways bildet ein Arduino Nano BLE mit bereits integrierter Sensorik sowie einem Bluetooth-Modul. Der Antrieb wurde mit Hilfe von günstigen Schrittmotoren mit Treibern realisiert. Alle elektronischen Komponenten sowie die Batterien konnten auf einem einzelnen Print untergebracht werden. Beim 3D-Druck wurde darauf geachtet, dass nur wenige Teile separat gedruckt werden müssen. Somit ist ein Nachbau für zukünftige Studenten einfach, günstig und schnell möglich.
Das Ergebnis ist ein optimierter und robuster Prototyp mit guten Fahreigenschaften. Dieser kann über die entwickelte App mit Hilfe eines Smartphones ferngesteuert werden.
Sascha Knecht
Simon Schertler