Positionsregelung eines Rovers unter Nutzung eines Tachymeters
Problemstellung: In vielen Anwendungen auf Baustellen oder bei der Vermessung kann eine automatisierte Plattform zur Positionierung die manuellen Arbeitsabläufe entweder beschleunigen oder komplett ersetzen. Im Rahmen dieser Bachelorarbeit wurde die Positionierung einer Roboterplattform unter Verwendung eines genauen Messsystems für die Positionsbestimmung untersucht. Dabei ist ein vollständiges Systemkonzept systematisch entwickelt und realisiert worden. Hauptmerkmal ist die Verwendung von möglichst einfachen Hardware- und Software Komponenten, um höchstmögliche Transparenz der Funktionsweise sicherzustellen.
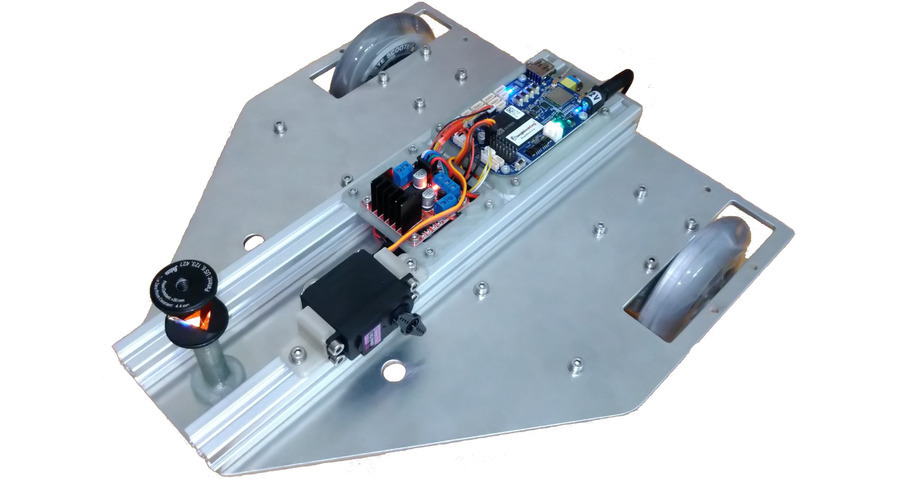
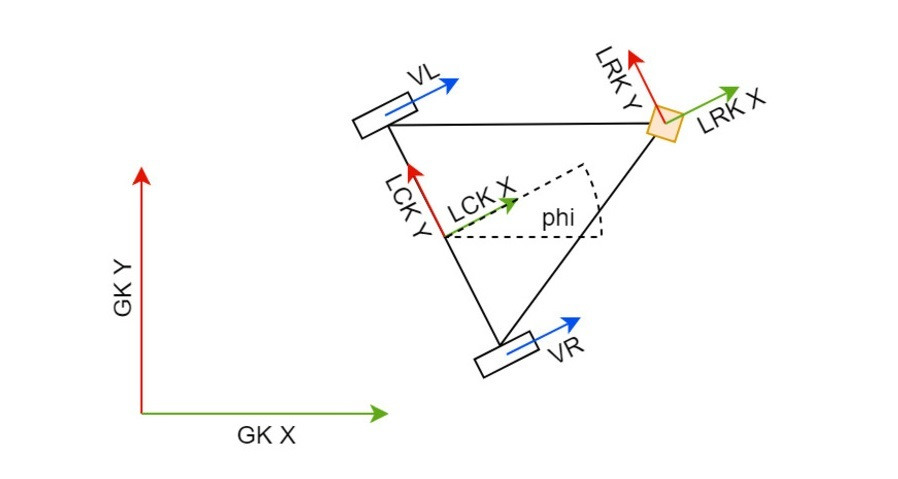
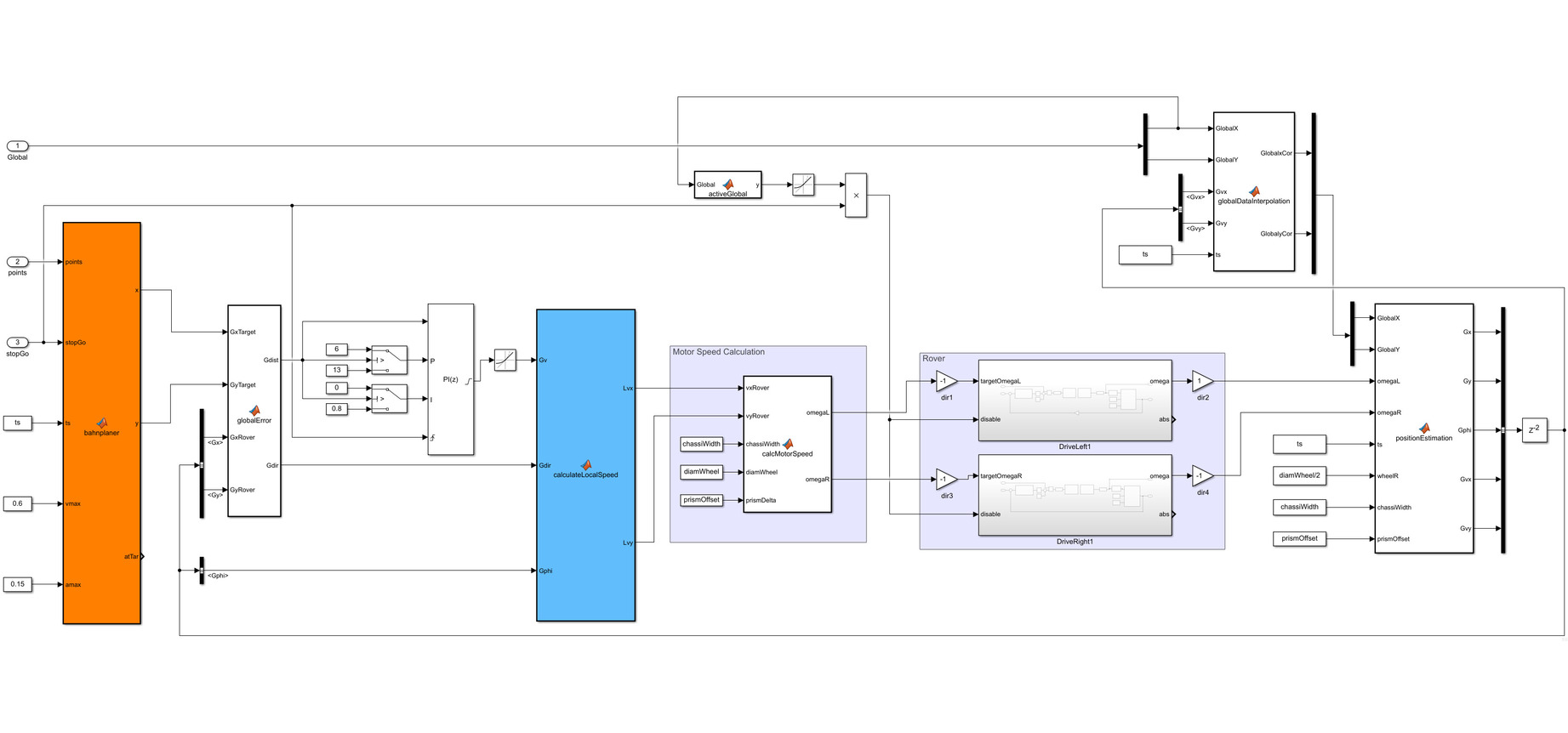
Vorgehen / Technologien: Die Hauptkomponente der automatisierten Plattform bildet ein asymmetrischer Differentialantrieb, der mithilfe von DC Elektromotoren umgesetzt wurde. Als Recheneinheit wurde ein Einplatinencomputer in Verbindung mit Simulink verwendet. Diese Programmiermethode erlaubte eine effiziente Arbeitsweise aufgrund der Kombination aus grafischer und textbasierter Programmierung. Für die Anbindung des Positionsmesssystems ist Python verwendet worden.
Fazit: Die Genauigkeit des Systems stand nicht im Vordergrund, sondern die Entwicklung des Gesamtsystems mit einem geschlossenen Regelkreis. Trotzdem konnte eine Genauigkeit von weniger als 2mm problemlos erreicht werden. Mit zusätzlicher Softwareoptimierung ist eine weitere signifikante Genauigkeitsverbesserung möglich.