Entwicklung und Realisierung eines kollisionssicheren autonomen navigierenden Fahrzeugs
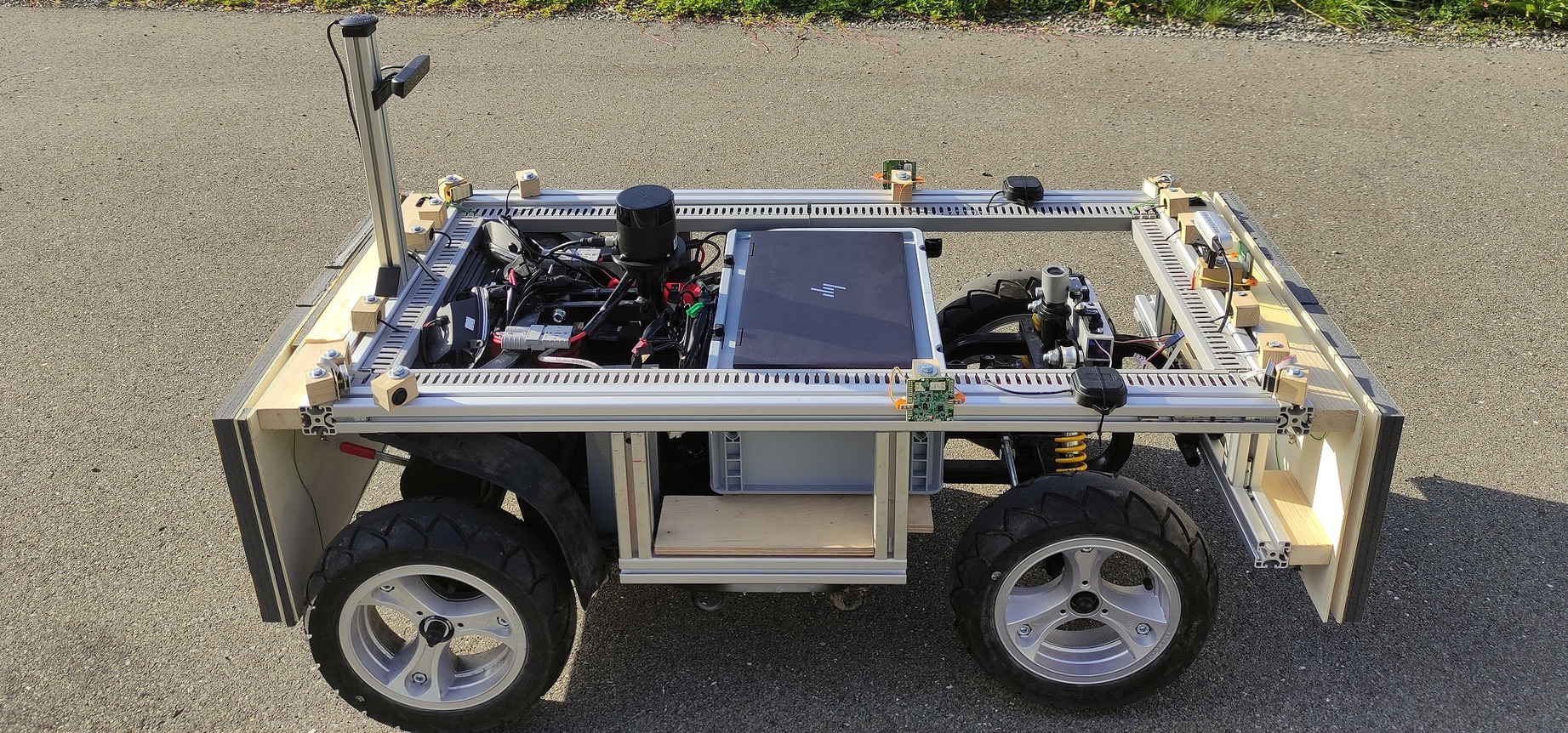
Ziel der Arbeit: Es soll ein im Massstab reduziertes Fahrzeug als Technologieträger entwickelt, aufgebaut und in Betrieb genommen werden, mit dem autonomes Fahren ausgetestet werden kann. Softwareseitig gibt es zwei Hauptbereiche, die Echtzeitsteuerung mit der Bahnregelung und der Sicherheitssoftware, welche Kollisionen verhindert und die Navigationssteuerung, welche das Fahrzeug in die Lage versetzt, beliebige Trajektorien zu fahren.
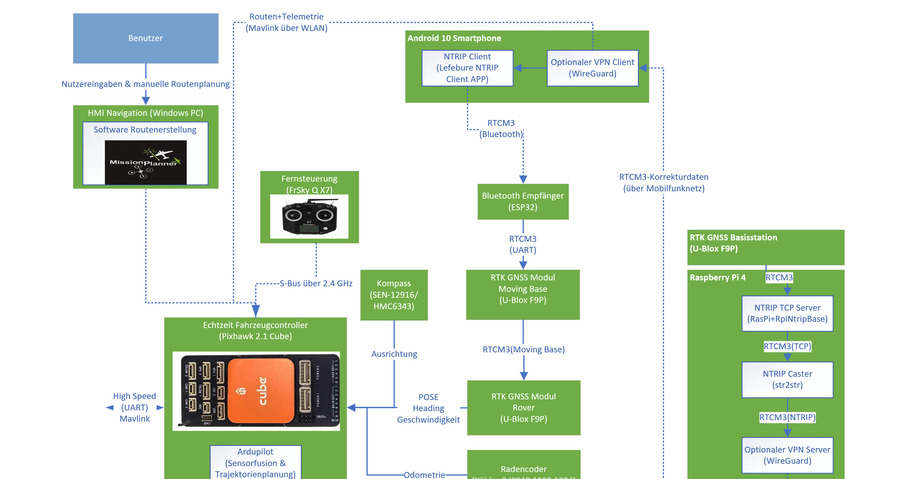
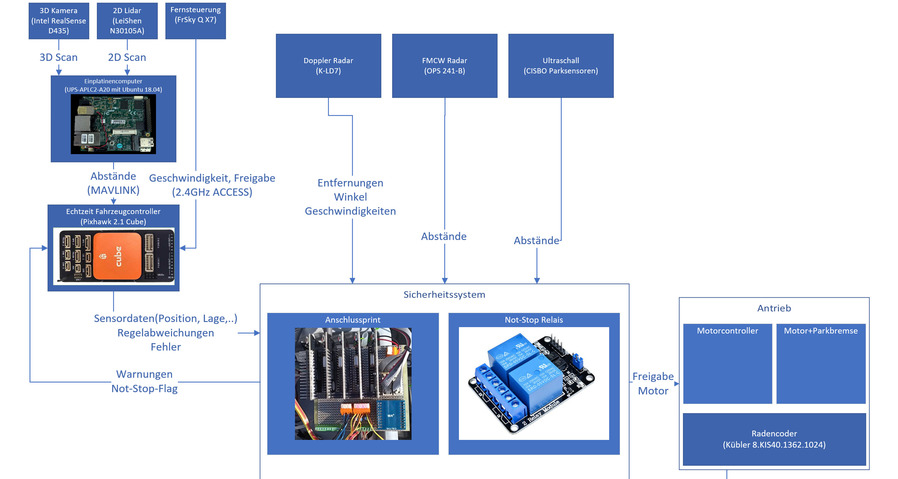
Vorgehen: Anhand einer exemplarischen funktionalen Sicherheitsanalyse wurde untersucht, welche Technologien für einen sicheren Einsatz autonomer Maschinen geeignet sind. Einige vielversprechende Technologien zur Kollisionsvermeidung wie Lidar, Radar und 3D-Kameras wurden auf dem Technologieträger aufgebaut. Ausserdem wurde ein Auswertesystem konzipiert, mit dem Sensordaten im realen Fahrbetrieb analysiert und ausgewertet werden können. Das Navigationssystem, mit dem autonome Testfahrten durchgeführt werden können, basiert auf Ardupilot, Robot Operating System und einem Echtzeitkinematik Navigationssatellitensystem.
Ergebnis: Der Technologieträger bietet in Kombination mit dem modular aufgebauten Navigationssystem und dem leistungsstarken UP Squared Einplatinenrechner eine hervorragende Testplatform zur Implementation von Erweiterungen und Integration von zusätzlicher Sensorik. Die Testergebnisse des Navigationssystems und der getesteten Sensorik zeigen, dass autonomes Fahren unter geeigneten Betriebsbedingungen mit bereits verfügbarer Technologie möglich ist.
Matei Schlegel