
Allgemeines Projekt
BMW X5 mit Steer by Wire
Das Projekt SUNCAR Steer by Wire beschäftigt sich mit der Umrüstung eines BMW X5 auf Elektro-Einzelradantrieb mit Torque Vectoring. Insbesonere soll eine Steer-by-Wire Steuerung implementiert werden. Das Torque Vectoring soll als fehlertolerante Rückfallebene für die Steer by Wire Steuerung dienen.
Mit Steer by Wire wird in einem Fahrzeug die mechanische Verbindung zwischen Lenkrad und Vorderachse getrennt und durch eine elektronische Verbindung ersetzt. Dies hat viele Vorteile wie Platzeinsparungen, ein verringertes Risiko bei Unfällen für den Fahrer und die Möglichkeit, das Fahrzeug unabhängig des Fahrers energieeffizient zu steuern. Damit dieses System auch im Falle eines technischen Defekts weiter funktioniert, werden Redundanzen wie das Torque Vectoring nötig
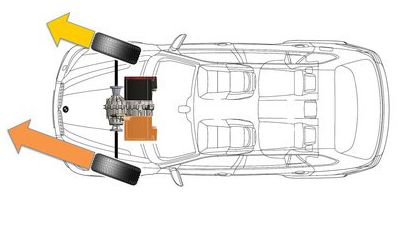
Die Technik des Torque Vectoring steuert Fahrzeuge durch unterschiedliche Drehmomente an den Rädern. Da der iSUV im Gegensatz zu vielen anderen Fahrzeugen zwei einzeln ansprechbare Frontmotoren besitzt, für jedes Rad einen, bietet dieses Fahrzeug ideale Voraussetzungen dazu. Denn an der Vorderachse kann zusätzlich zum unterschiedlichen Drehmoment auch der daraus resultierende Unterschied in der Präzessionskraft genutzt werden, um die Räder während der Fahrt in Steuerrichtung zu drehen. Dies macht dieses System noch effizienter.
Zur Beherrschung von Torque Vectoring brauchte es einerseits die Modellierung und Simulation der Fahrdynamik und andererseits eine robuste Regelung. Von den Studierenden der NTB wurde die Simulation der Fahrdynamik und von den Studierenden der ETH der Umbau des Fahrzeuges und die Regelung bereitgestellt.

Laufzeit: 22.08.2016